自動消殺機器人

案例介紹
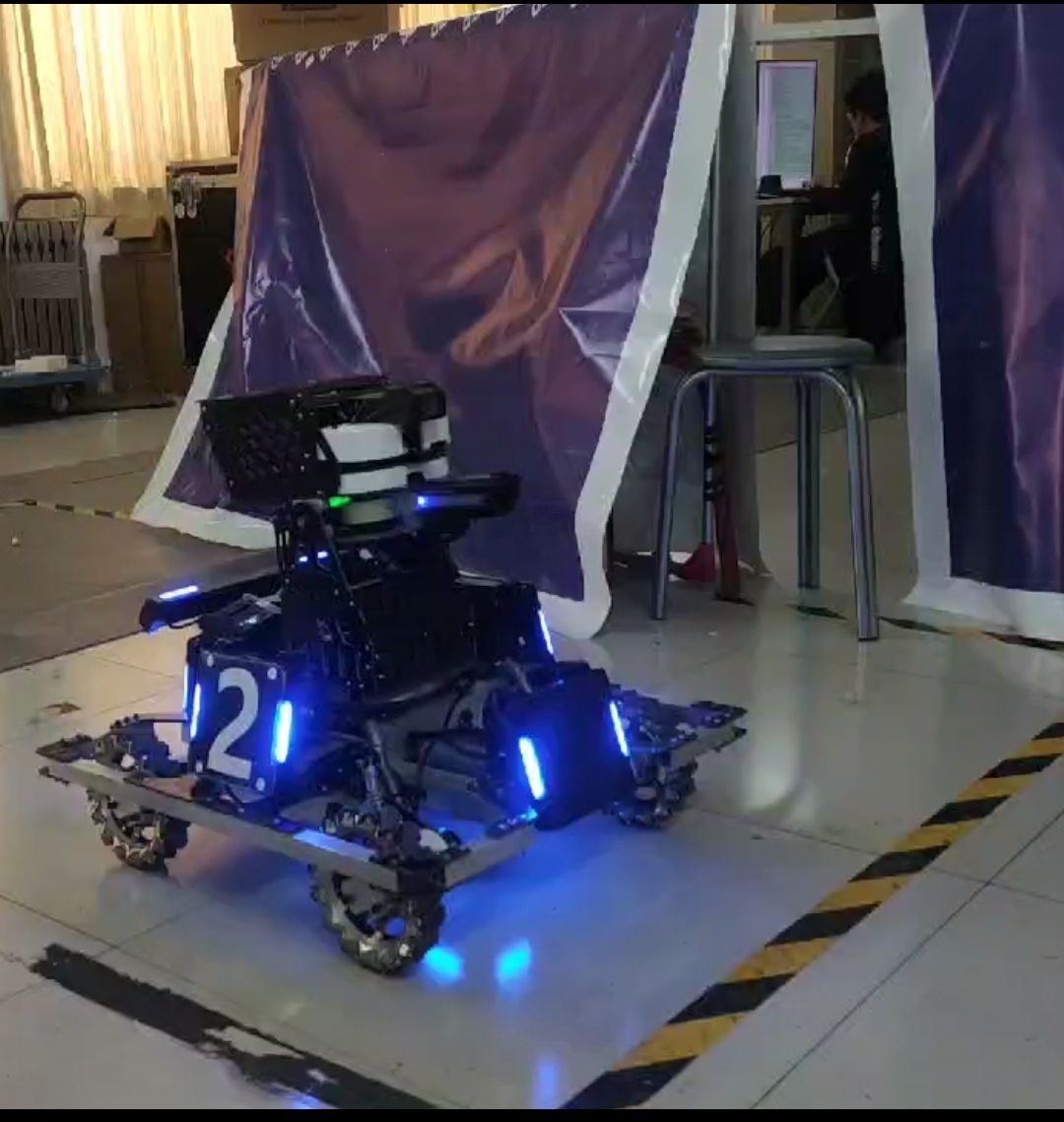
機器人通過使用深度學(xué)習(xí)視覺算法 slam 建圖實現(xiàn)自主路徑規(guī)劃,使其能夠按照現(xiàn)實情況
進行路徑自主規(guī)劃,提高效率;使用 TOF 深度相機與超聲波和紅外相結(jié)合的方案,避免在巡邏過程中與障礙物相撞,實現(xiàn)自主避障;將消殺噴頭安裝在機器人的二自由度云臺上,同時相機也隨云臺運動,實現(xiàn)360°全方位覆蓋噴灑,避免了機械式擺動云臺噴灑帶來的誤差。將普通的舵輪底盤加裝懸掛系統(tǒng),減少外界的震動或沖擊對設(shè)備、控制元件等的影響,從而起到減震緩沖的作用。
主要負責(zé):相機捕獲信息的處理,運動控制的算法設(shè)計,各模塊的底層驅(qū)動
案例圖片

相似案例推薦
其他人才的相似案例推薦
-
備自動化控制軟件")
超高精度磁通測量設(shè)備自動化控制軟件
測量磁鐵表面的高斯強度值,其由于生產(chǎn)工藝不同測量工藝方案也不
-

水下機器人控制器
水下機器人控制器軟硬件開發(fā),主要功能有舵機、電機控制,TF卡
-

圖像分割
熟悉各種AI圖像分割方案。可實現(xiàn)。 如fastrcnn、m
-

圖像檢測
對各種圖像進行AI對象檢測。 對AI模型進行各種優(yōu)化加速。
-
")
智能倉儲立體倉庫系統(tǒng)
1 主要負責(zé)系統(tǒng)架構(gòu)梳理及調(diào)整,優(yōu)化系統(tǒng),保證系統(tǒng)運行穩(wěn)定
-
清掃車項目")
園區(qū)清掃車項目
完成自動駕駛規(guī)劃控制模塊的設(shè)計及實現(xiàn)(實現(xiàn)方式主要為 PID
-
站爬蟲")
小說網(wǎng)站爬蟲
爬取圖片,視頻,小說等網(wǎng)站, 熟練使用selenium,進行
-
站爬蟲")
小說網(wǎng)站爬蟲
熟悉爬取各大小說,圖片, 視頻網(wǎng)站, 能繞過各種反爬機制,
-
")
公司官網(wǎng)
通過官網(wǎng)可對公司產(chǎn)品和基本信息基本了解,可實現(xiàn)公司與客服了解
-

MOIN 口袋云臺相機
上層搭載單臂三軸小型云臺系統(tǒng),攝像頭,云臺控制以及電機驅(qū)動和
-

視覺檢測軟件
該軟件為一款用于工業(yè)生產(chǎn)的通用尺寸測量軟件,可在設(shè)置界面定制
-
蜘蛛手視覺引導(dǎo)抓取定位")
并聯(lián)蜘蛛手視覺引導(dǎo)抓取定位
識別定位徽章坐標,并且按照徽章等級進行分類。根據(jù)徽章圖案所示
微信接收人才推送
關(guān)注猿急送微信平臺,接收實時人才推送

