智能抓取蜘蛛機器人

案例介紹
負責硬件設計與制造:設計和構建機器人的物理結構,包括六足的機械結構、傳感器布局、電源系統等。在設計過程中考慮機器人的穩定性、機械運動性能和負載承受能力。
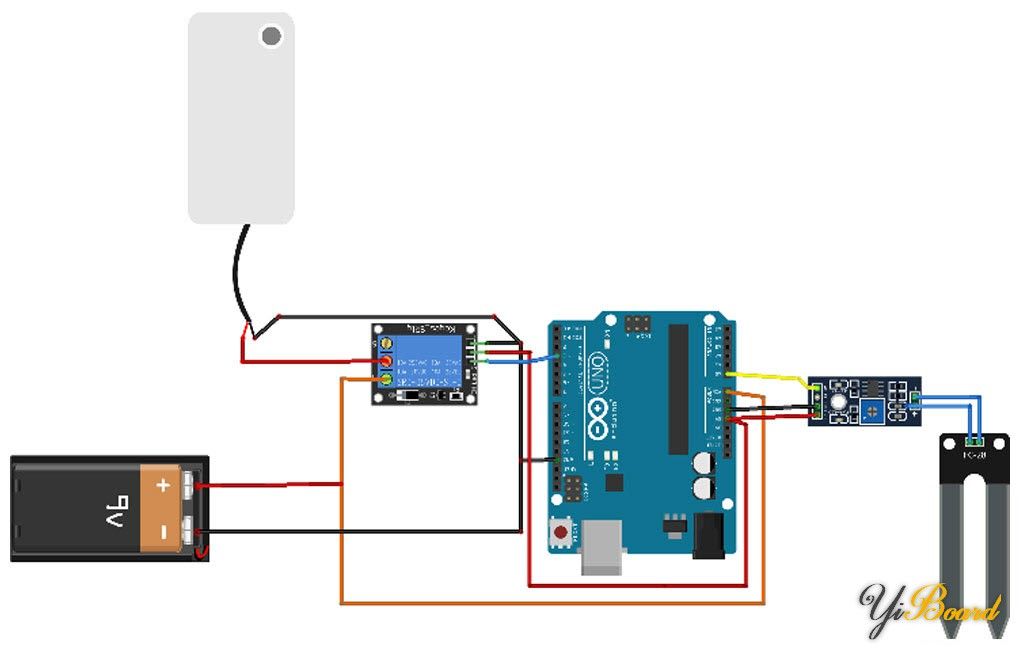
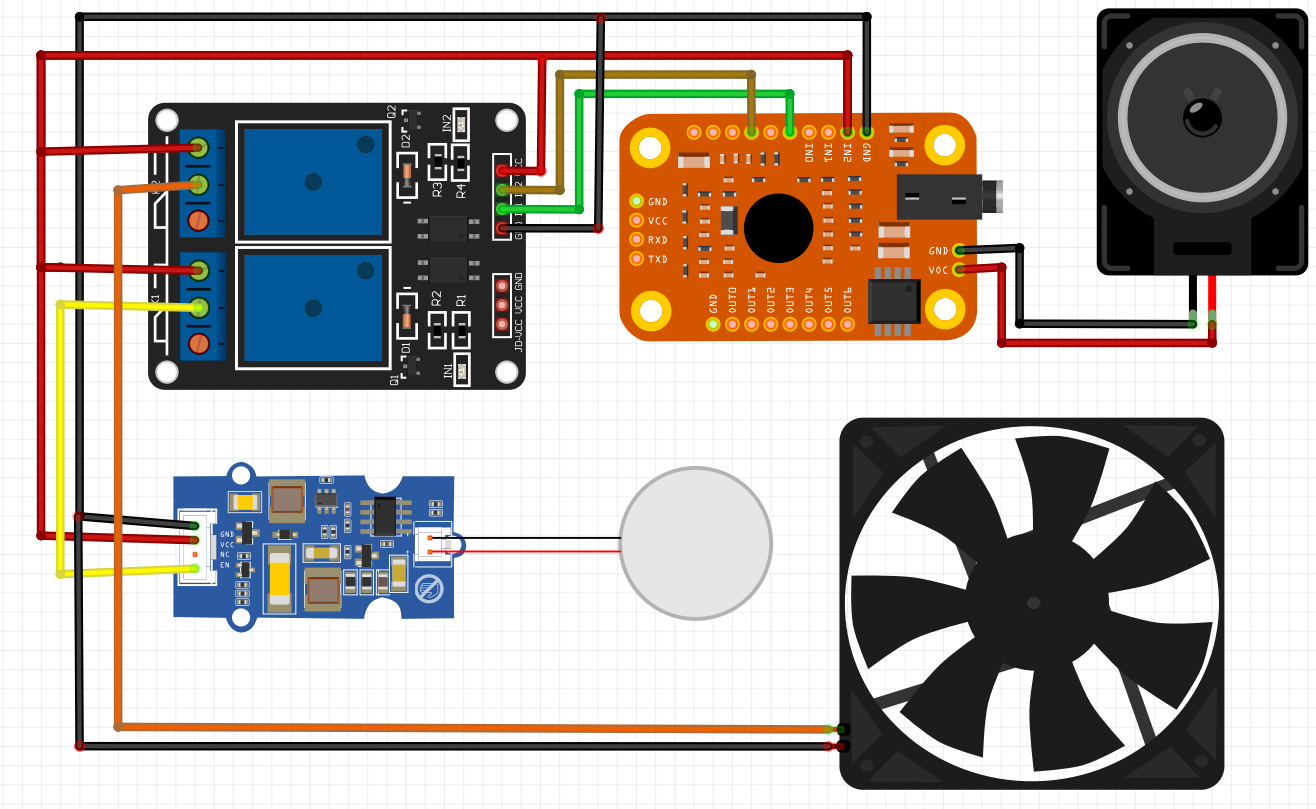
負責設計電子系統:配備合適的電子設備,如微控制器、傳感器、運動控制器等。這些設備將用于實現機器人的感知、決策和執行功能。
負責設計運動控制:通過合理的運動控制算法和機構設計,使機器人能夠實現穩定、靈活和高效的六足運動。這通常涉及步態控制、坐標轉換、軌跡規劃等技術。
負責設計傳感與感知:機器人需要具備多種傳感器,以獲取環境信息和自身狀態。例如,可以使用接近傳感器、慣性測量單元(IMU)、攝像頭等傳感器來感知周圍的障礙物、地面條件等。
負責數據處理與決策:機器人需要進行數據處理和決策,以根據傳感器數據進行地面分析、路徑規劃、障礙物避讓等決策過程。這可能涉及使用機器學習和計算機視覺算法。
負責軟件開發:通過編程實現機器人的控制邏輯、數據處理、通信和用戶界面等功能。可以使用各種編程語言和開發框架來實現軟件部分。
案例圖片
相似案例推薦
其他人才的相似案例推薦
-

慧閃住
2019.02~至今 開發上線維護民宿/網約房登記管理系統
-

魅族-手機官網
功能介紹: 手機展示:以圖文并茂的方式展示各種手機產品,包
-

星云社區
該產品是以校園物聯網為核心業務,打造干凈衛生、方便快捷、價格
-

格綠班
居民在投放可回收垃圾時將小程序生成的二維碼給智能回收箱掃描,
-

格綠班
居民在投放可回收垃圾時將小程序生成的二維碼給智能回收箱掃描,
-

河南生態環境衛星遙感監測系統
負責內容︰ 1、對項目的功能進行開發; 2、充分利用
-

樂摩吧小程序
由于 C 端系統老舊,已經難以滿足公司當下的業務需求和未來發
-

燃客物聯網平臺
燃客物聯網開放平臺是公司面對物聯網項目的一次整合,整合之前所
-

智能設備管理云平臺
主要功能包括: 1. 投遞柜、回收箱類設備的管理,設備是基
-

城市垃圾清運系統
主要功能: 1. 智能終端(Android)安裝在垃圾收運
-

激光追蹤系統
作為隊長參加2023年電賽,主要負責代碼編寫和調試。2023
-

物聯網系統設計
保證需求方對于物聯網智慧化企業轉型的原件系統需求以便企業管理
微信接收人才推送
關注猿急送微信平臺,接收實時人才推送

