
案例介紹
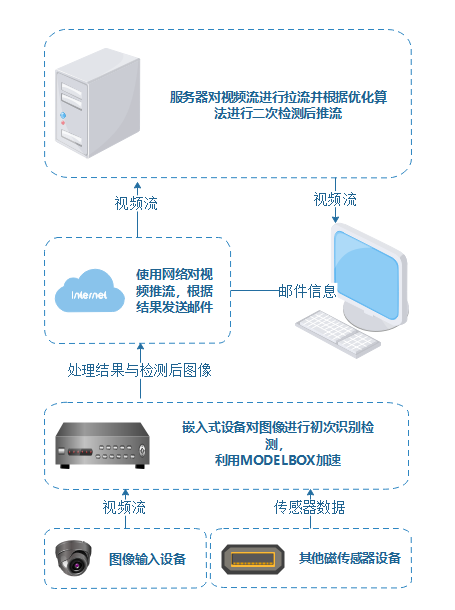
利用端側(cè)算力單元與云上算力相結(jié)合檢測(cè)目標(biāo)圖像是否疲勞駕駛,兼顧算法的速度與精度保證識(shí)別的準(zhǔn)確性。
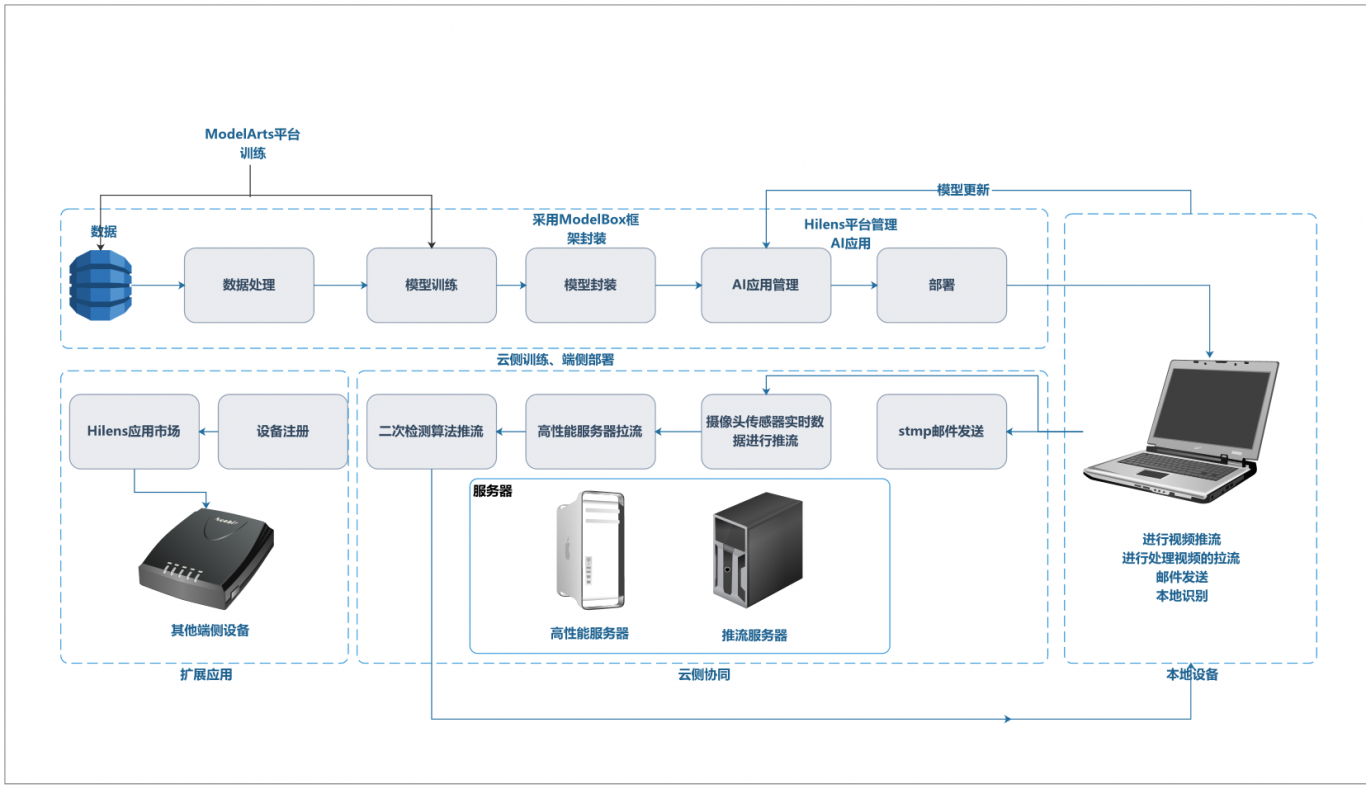
- 利用yolov7與關(guān)鍵點(diǎn)檢測(cè)模型對(duì)狀態(tài)識(shí)別,實(shí)現(xiàn)推理算法的編寫,并將模型部署至modelbox實(shí)現(xiàn)并行計(jì)算
- 模型優(yōu)化整理合并,包括多線程、模型剪枝、onnxruntime量化部署使速度提高,對(duì)數(shù)據(jù)預(yù)處理使準(zhǔn)確率的提高
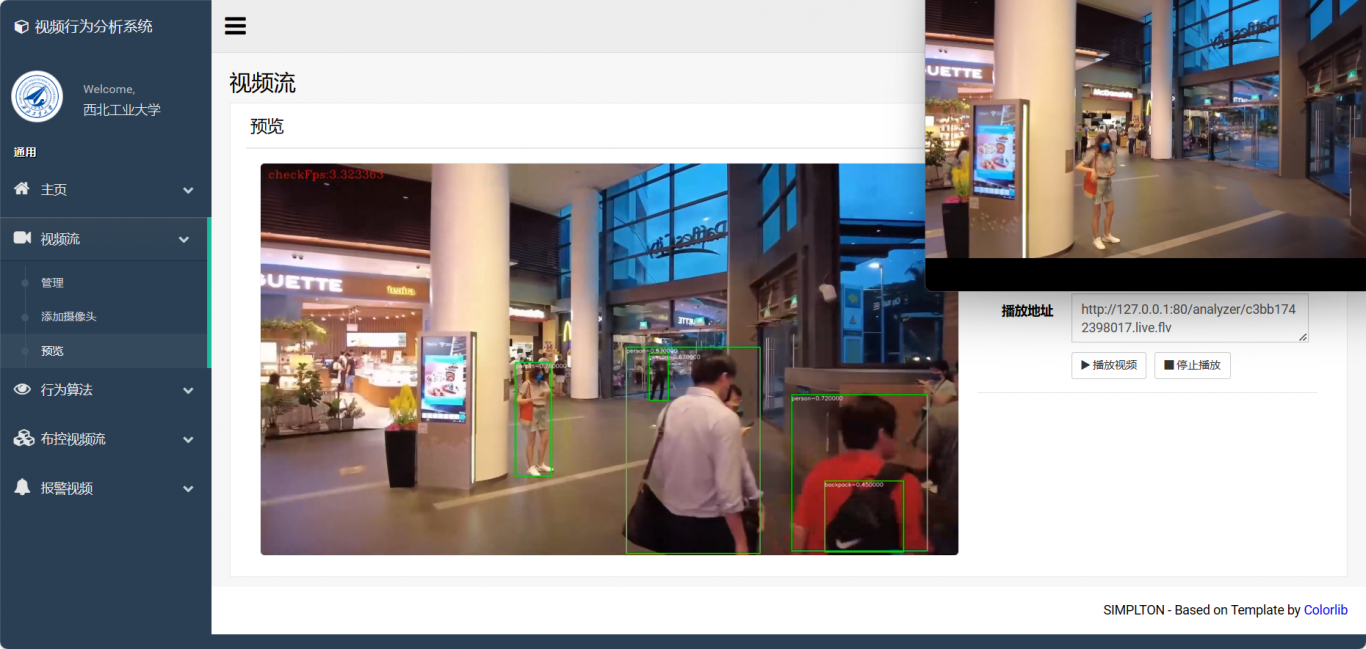
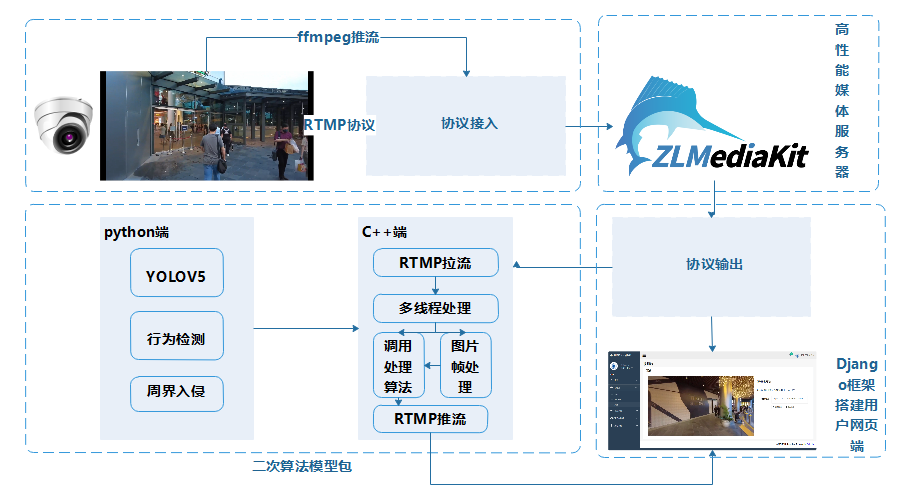
- 搭建視頻行為分析網(wǎng)站,使用RTMP協(xié)議通過ZLM流媒體服務(wù)器將端側(cè)畫面進(jìn)行推流直播,云側(cè)搭建優(yōu)化算法框架
案例圖片
相似案例推薦
其他人才的相似案例推薦
-
接微信")
chatgpt對(duì)接微信
使用openai的api,對(duì)接微信機(jī)器人,使得微信具有自動(dòng)回
-
APP")
chatgpt相關(guān)APP
利用chatgpt做一系列的APP,包括但不限于智能客服,文
-
倉儲(chǔ)可視化系統(tǒng)")
寶灣智慧園區(qū)倉儲(chǔ)可視化系統(tǒng)
1、分析客戶行業(yè)的業(yè)務(wù)體系,規(guī)劃設(shè)計(jì)項(xiàng)目業(yè)務(wù)管理系統(tǒng),利用物
-
所有書本圖片和名稱")
爬取讀書網(wǎng)所有書本圖片和名稱
使用crawl方式,爬取讀書網(wǎng)所有書本圖片和名稱,并且下載書
-
站")
AI私有化網(wǎng)站
介紹:AI對(duì)話 可接入多個(gè)模型,AI繪畫 目前支持MJ繪畫
-

遺忘詞庫程序
本版程序主要完成了詞庫的生成、主題詞發(fā)現(xiàn)、熱詞發(fā)現(xiàn)的功能。
-

車載多媒體模塊
車載多媒體app 包含qq音樂 、喜馬拉雅、藍(lán)牙音樂 、本地
-

小莉管家
一款兼具智慧安防和智慧社區(qū)服務(wù)功能的專業(yè)應(yīng)用,在守護(hù)社區(qū)安全
-

智能bi
基于React + Spring Boot + MQ + A
-
網(wǎng)")
消防物聯(lián)網(wǎng)
承擔(dān)公司三大平臺(tái)的搭建/維護(hù)/開發(fā)的所有工作; 三大平
-
")
小程序教育開發(fā)
整個(gè)小程序的開發(fā)功能,老師入駐.家長(zhǎng)入駐.代理商劃分區(qū)域管理
-
站私人定制開發(fā)")
小程序場(chǎng)站私人定制開發(fā)
場(chǎng)站私人定制開發(fā),有很多保密協(xié)議所以不能具體介紹詳細(xì)功能,主
微信接收人才推送
關(guān)注猿急送微信平臺(tái),接收實(shí)時(shí)人才推送

